- Statisches AFM
- Regelkreis
- Wechselwirkung auf atomarer Skala
- Lennard-Jones-Modell
Zusammenfassung
Das Rasterkraftmikroskop (atomic force microscope: AFM) ist ein wichtiges Instrument der Oberflächenforschung, denn mit dem AFM lässt sich die Oberfläche aller (insbesondere auch nichtleitender) Proben direkt abbilden. Mit einem modernen AFM können einzelne Atome auf Festkörperoberflächen und an der fest-flüssig Grenzfläche abgebildet werden.
Die Grundidee des Rasterkraftmikroskops ist es, die Kraft zwischen einer Messspitze und der zu untersuchenden Probe zu messen. Aus der gemessenen Kraft sollen Rückschlüsse auf Probeneigenschaften gezogen werden. Wird die Messspitze über die Oberfläche geführt (gerastert) und dabei die Kraft gemessen, erhält man eine Abbildung der Probenoberfläche basierend auf lokalen Unterschieden in der Kraft zwischen Spitze und Probe.
Das AFM wurde 1986 von Gerd Binnig, Calvin Quate und Christoph Gerber entwickelt. Diese Autoren konnten die Kraft zwischen Spitze und Probe bestimmen, indem sie die Messspitze am freien Ende eines einseitig eingespannten Biegebalkens (cantilever) befestigten und die Verbiegung dieses Balkens maßen. Die Verbiegung des Biegebalkens ist proportional zur auf die Spitze wirkenden Kraft. Das gleiche Prinzip wird im vorliegenden Versuch verwendet. Hier haben Sie die Möglichkeit, das AFM kennen zu lernen und die Oberflächen einer CD und einer DVD abzubilden.
Lernziele:
Bitte bringen Sie zur Versuchsdurchführung einen USB-Stick mit.
Theoretische Grundlagen
Das Grundprinzip
Der Aufbau eines Rasterkraftmikroskops ist schematisch in Abbildung dargestellt. Im linken Teil von Abbildung ist das eigentliche AFM mit Probe, Cantilever, Verbiegungsdetektor und Positionierungssystem zu sehen. Im rechten Teil von Abbildung ist die Datenerfassung und die Regelung für den Betrieb als statisches AFM gezeigt.

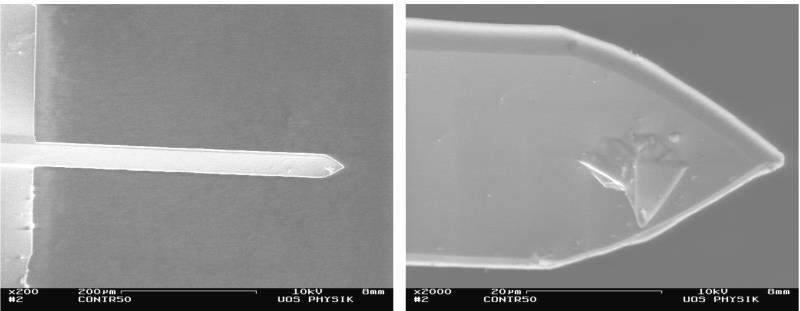
Die für die Detektion der auf die Messspitze wirkenden Kraft wesentlichen Teile werden im Folgenden kurz beschrieben. Als erstes ist der Cantilever mit der am Ende befindlichen Messspitze (direkt über der Probenoberfläche) zu nennen. Ein typischer Cantilever ist in Abbildung gezeigt. Um ein AFM Bild zu erhalten, wird die Messspitze rasterförmig über die Probenoberfläche geführt. Im gezeigten Schema in Abbildung bleibt der Cantilever dafür unbewegt und die Probe wird bewegt. Der Cantilever reagiert auf Änderungen der lokalen Probeneigenschaften (physikalische und chemische Eigenschaften sowie Topologie) unter der Messspitze mit einer Änderung der Verbiegung, welche mit Hilfe eines Laserstrahls detektiert wird. Der Laserstrahl wird hierfür auf die Cantileverrückseite fokussiert, von dort reflektiert und trifft schließlich auf einen positionssensitiven Photodetektor (PSPD). Der PSPD ist eine in vier Segmente unterteilte Photodiode, bei der jedes Segment einen der einfallenden Lichtmenge proportionalen Photostrom erzeugt. Durch geeignetes Aufsummieren der Signale der einzelnen Segmente kann sowohl die laterale als auch die vertikale Komponente der Verbiegung des Cantilevers bestimmt werden.
Die rasterförmige Bewegung sowie die Abstandsregelung werden meist durch Piezoelemente ermöglicht. Dabei kann je nach Gerät entweder die Probe bewegt werden, so wie in Abbildung dargestellt, oder der Cantilever. Piezoelemente reagieren auf ein elektrisches Feld mit einer mechanischen Verformung. Je nach angelegter Spannung dehnen sie sich aus oder ziehen sich zusammen. Auf diese Weise können mechanische Bewegungen auf subatomarer Längenskala realisiert werden. Eine angelegte Spannung von einem Volt führt typischerweise zu einer Längenänderung des Piezoelements von zehn Nanometern. Beim AFM Experiment wird der relative Abstand zwischen Probe und Cantilever aus der Piezoauslenkung \vec r_\text p = (x_\text p, y_\text p, z_\text p) bestimmt.
Beim hier verwendeten statischen AFM wird nur die statische Verbiegung q_\text s des Cantilevers gemessen. Daraus ergibt sich ein Verbiegungsbild q_\text s(x_\text P, y_\text P). Die Cantileververbiegung kann während der Messung durch einen Abstandsregelkreis konstant gehalten werden. Der Abstandsregelkreis ändert hierfür die z-Position der Probe z_\text P so, dass die Verbiegung einem vordefinierten Sollwert (setpoint) entspricht. Ändert sich die Kraft zwischen Spitze und Probe, so wird der Cantilever in der Folge stärker oder weniger stark als zuvor verbogen. Diese Änderung der Verbiegung wird über den Laserstrahl und den PSPD detektiert. Auf diese Änderung der Verbiegung reagiert der Regelkreis, indem er die Probe relativ zum Cantilever bewegt (annähert oder wegzieht), sodass die Verbiegung des Cantilevers wieder auf das ursprüngliche Maß reduziert oder erhöht wird und somit wieder dem voreingestellten Sollwert entspricht. Die z-Position der Probe folgt demnach während der Messung einer Kontur gleicher Cantileververbiegung. Diese Kontur gleicher Verbiegung z_\text P (q_\text s = \text{konst.}) ähnelt bei vielen Proben der Oberflächentopologie. Daher wird dieses Bild oft Topographie z_\text P(x_\text P, y_\text P) genannt.
Ist der Abstandsregelkreis abgeschaltet, so kann mit hoher Geschwindigkeit über die Probenoberfläche gerastert werden. Allerdings sollte dieser Modus konstanter Höhe nur auf flachen Proben angewendet werden, weil die Spitze durch Hindernisse leicht beschädigt werden kann. Insbesondere bei unbekannten Proben ist es ratsam, den Abstandsregelkreis einzuschalten, um eine Beschädigung der Spitze durch rechtzeitiges Zurückziehen vermeiden zu können. Allerdings ist die Rastergeschwindigkeit in diesem Modus konstanter Verbiegung durch die Zeit begrenzt, die der Abstandsregelkreis zum Reagieren benötigt.
Da der Cantilever nicht nur auf die Kraft zwischen Probe und Spitze reagiert, sondern auch auf äußere Einflüsse wie Gebäudeschwingungen, ist eine gute Isolierung des AFMs gegen mechanische Schwingungen entscheidend. Bereits kleinste Gebäudeschwankungen und sogar Sprechgeräusche in der Nähe des Messgerätes können die Messung stören. Die mechanische Entkopplung des Gerätes vom Gebäude wird oft durch einen Schwingungen dämpfenden Tisch und eine Einhausung realisiert.
Statisches AFM
Die Messelektronik des AFMs zeichnet stets die Topographie z_\text P(x_\text P , y_\text P) (Bild der Auslenkung des z-Piezos) und das Verbiegungsbild q_\text{s} (x_\text P,y_\text P) (Bild der statischen Verbiegung des Cantilevers) auf. Aus beiden Informationen zusammen, kann die Kraft zwischen Spitze und Probe als Funktion des Abstandes zwischen Spitze und Probe ermittelt werden. Diese Zusammenhänge werden im Folgenden näher erläutert.
Die Kraft
Wie bereits erwähnt, basiert das AFM auf der Messung der Kraft zwischen Probenoberfläche und Messspitze. Die von der Probe verursachte und auf die Spitze wirkende Kraft \vec F_\text{ts}(\vec r_\text{ts}) ist eine Funktion des Abstandes \vec r_\text{ts}=(x_\text{ts},y_\text{ts},z_\text{ts}) zwischen Spitze und Probe. Für konservative Wechselwirkungen gilt der Zusammenhang zwischen Kraft \vec F_\text{ts}(\vec r_\text{ts}) und potentieller Energie V_\text{ts}(\vec r_\text{ts}):
\vec F_\text{ts}(\vec r_\text{ts})=-\nabla V_\text{ts}(\vec
r_\text{ts})=-\left(\frac{\partial V_\text{ts}(\vec
r_\text{ts})}{\partial x_\text{ts}}, \frac{\partial V_\text{ts}(\vec
r_\text{ts})}{\partial y_\text{ts}}, \frac{\partial V_\text{ts}(\vec
r_\text{ts})}{\partial z_\text{ts}}\right)
Die Kraft ergibt sich im Falle konservativer Wechselwirkungen also als Gradient der potentiellen Energie. Im vorliegenden Versuch nehmen wir der Einfachheit halber an, dass die Kraft nur senkrecht zur Probenoberfläche wirkt: \vec F_\text{ts}(\vec r_\text{ts}) = F_\text{ts} (\vec r_\text{ts})\vec e_\text z. Nur die in z-Richtung (angezeigt durch \vec e_\text{z} ) wirkende Normalenkomponente F_\text{ts} (\vec r_\text{ts} ) der Kraft ist von Null verschieden. Wenn die Kraft nur eine Normalenkomponente hat, vereinfacht sich Gleichung (1) zu:
\vec F_\text{ts}(\vec r_\text{ts})=-\left(0,0,\frac{\partial
V_\text{ts}}{\partial z_\text{ts}(\vec
r_\text{ts})}\right)\qquad\text{bzw.}\qquad
F_\text{ts}=-\frac{\partial V_\text{ts}(\vec r_\text{ts})}{\partial
z_\text{ts}}
Im Folgenden wird zunächst die Abhängigkeit der Kraft vom senkrechten Abstand z_\text{ts} zwischen Spitze und Probe diskutiert.
Neben der potentiellen Energie V_\text{ts} (z_\text{ts}) und der Normalkraftkomponente F_\text{ts} (z_\text{ts}) kann man dann auch den Kraftgradienten k_\text{ts}(z_\text{ts}) angeben. Dieser gibt an, wie sich die Kraft mit dem Abstand ändert:
k_\text{ts}(z_\text{ts})=\frac{\partial F_\text{ts}(\vec
r_\text{ts})}{\partial z_\text{ts}}=-\frac{\partial^2 V_\text{ts}(\vec
r_\text{ts})}{\partial z_\text{ts}^2}
Abbildung 3 verdeutlicht den Zusammenhang zwischen potentieller Energie, Kraftkomponente und Kraftgradient. Die Abhängigkeit der Normalenkomponente der Kraft vom senkrechten (normalen) Abstand zwischen Spitze und Probe wird häufig vereinfachend Kraft-Abstands-Kurve F_\text{ts}(z_\text{ts}) genannt.
Die Kraft-Abstands-Kurve
Beim statischen AFM sind Probe und Cantilever im Gleichgewicht stets in Ruhe (stationärer Fall). Wie Abbildung 3 zeigt, kann die Kraft zwischen Spitze und Probe entweder attraktiv oder repulsiv sein. Bei attraktiver Wechselwirkung biegt sich der Cantilever zur Probe hin, bei repulsiver Wechselwirkung biegt sich der Cantilever von der Probe weg. Die statische Verbiegung resultiert einerseits aus der Wechselwirkung zwischen Probe und Messspitze am freien Ende des Cantilevers und andererseits aus der Fixierung des festen Endes des Cantilevers. Im stabilen Gleichgewicht ist die potentielle Energie des Systems bestehend aus Cantilever und Probe minimal. Die notwendige Gleichgewichtsbedingung lautet also: Die Kraft F auf die Messspitze ist im stationären Fall gleich null. Die rücktreibende Kraft, welche durch die Cantileveraufhängung verursacht wird, kompensiert genau die Kraft, welche von der Probe verursacht wird:
F = -k q_\text s + F_\text{ts} = 0 \Leftrightarrow F_\text{ts} = k
q_\text s
Gleichung (4) bedeutet: Wirkt eine Kraft auf die Messspitze verursacht von der Probe, reagiert der Cantilever darauf mit einer statischen Verbiegung
q_\text s = F_\text{ts} / k.
Die lineare Abhängigkeit der statischen Verbiegung von der Kraft F_\text{ts} gilt nur für kleine Kräfte. Gleichung (5) heißt Hooke’sches Gesetz. Die Proportionalitätskonstante k heißt Federkonstante und ist eine Eigenschaft des Cantilevers. Ist die Federkonstante bekannt, kann die gemessene statische Verbiegung in die Kraft umgerechnet werden.
Gleichung (4) stellt die notwendige Gleichgewichtsbedingung (potentielle Energie ist extremal) dar. Die hinreichende Bedingung (Extremum ist ein Minimum der potentiellen Energie) lautet:
\frac{\partial^2V}{\partial z_\text{ts}^2}= -\frac{\partial
F}{\partial z_\text{ts}}= k-k_\text{ts}>0\Leftrightarrow k >
k_\text{ts}.
Ist die Bedingung k>k_\text{ts} nicht erfüllbar, gibt es bei dem dazu gehörenden Abstand kein stabiles Gleichgewicht. Dieser Teil der Kraft-Abstands-Kurve ist, wie in Abbildung 4 illustriert, experimentell nicht zugänglich. Stattdessen kommt es häufig zu einer schlagartigen Veränderung der Verbiegung bei der Annäherung der Spitze an die Probe (Pfad von (1) nach (2) in Abbildung 4) und beim Zurückziehen der Spitze von der Probe (Pfad von (3) nach (4) in Abbildung 4). Die Messspitze springt sobald k < k_\text{ts}. Dieser Effekt erschwert das vorsichtige Annähern der Spitze an die Probe und kann im schlimmsten Fall sowohl Probe als auch Spitze beschädigen.
Da im repulsiven Bereich, wegen
k > 0 > k_\text{ts} Gleichung
(6) automatisch erfüllt ist, wird statisches AFM meist im repulsiven
Bereich betrieben. Im repulsiven Bereich ist der Abstand zwischen
Spitze und Probe sehr klein und ändert sich beim Annähern des
Cantilevers an die Probe kaum. Deshalb wird statisches AFM oft als
AFM im Kontaktmodus
bezeichnet. Der Begriff ist irreführend,
weil man statisches AFM auch im attraktiven Bereich betreiben kann und
weil der Abstand zwischen Spitze und Probe auch im repulsiven Bereich
nicht Null wird.
Um eine möglichst große Sensitivität zu erreichen, ist es sinnvoll weiche Cantilever (kleine Federkonstante) zu verwenden. Nur dann hat eine kleine Kraft eine große Verbiegung des Cantilevers zur Folge (siehe Gleichung 5). Gleichzeitig schränkt eine kleine Federkonstante den experimentell zugänglichen Bereich ein (Gleichung 6).
Der Abstand zwischen Spitze und Probe ist gegeben als
z_\text{ts} = z_\text o + z_\text p + q_\text s .
Allerdings ist der Referenzabstand zwischen Spitze und Probe z_\text{ts} = z_\text 0 wenn Cantilever und Probe in ihrer jeweiligen Ausgangslage z_\text p = 0 und q_\text s = 0 sind, in der Regel nicht bekannt. Daher wird meist nur der relative Abstand z_\text{ts} - z_0 = z_\text p + q_\text s bestimmt und diskutiert.
Mithilfe von Gleichung (5) und (7) kann aus der gemessenen Topographie z_\text p(x_\text p, y_\text p) und dem gemessenen Verbiegungsbild q_\text s (x_\text p, y_\text p) ein Kraftbild berechnet werden:
F_\text{ts}(z_\text{ts} = z_\text o + z_\text p + q_\text s) = k
q_\text s.
Relevante Wechselwirkungen
Ursachen der Wechselwirkung zwischen Spitze und Probe sind typischerweise die Elektrostatik (Coulombkraft), die Van-der-Waals-Wechselwirkung und die Austauschwechselwirkung (chemische Bindung sowie Paulirepulsion). Die elektrostatische Kraft und die Van-der-Waals-Kraft können sowohl attraktiv als auch repulsiv sein. Sie gelten als Kräfte mit großer Reichweite. Austausch- wechselwirkungen hingegen sind Kräfte mit kurzer Reichweite die entweder attraktiv (bindende Zustände besetzt) oder repulsiv (antibindende Zustände besetzt) sind. Tabelle 1 ist eine Übersicht über die für die Bildgebung im AFM üblicherweise verantwortlichen Kräfte und deren Abstandsabhängigkeit. Außerdem ist die Abstandsabhängigkeit der dazu gehörenden potentiellen Energie angegeben. Das ist möglich, weil die hier diskutierten Wechselwirkungen konservative Kräfte (auch Potentialkräfte genannt) sind und somit Gleichung (1) gilt.
| Wechselwirkung | Potentielle Energie | Kraft |
| Elektrostatik (für zwei Punktladungen) | \propto z_\text{ts}^{-1} | \propto z_\text{ts}^{-2} |
| Van-der-Waals (für zwei rotierende Punktdipole) | \propto z_\text{ts}^{-6} | \propto z_\text{ts}^{-7} |
| Austauschwechselwirkung | Hängt von beteiligten Orbitalen ab | |
| Paulirepulsion | extrem kurz; oft modelliert als \propto z_\text{ts}^{-12} | \propto z_\text{ts}^{-13} |
Elektrostatik
Elektrostatische Wechselwirkungen werden durch das Coulombgesetz beschrieben, welches die Kraft zwischen zwei elektrisch geladenen Teilchen angibt. Dabei ist die Kraft auf ein positiv geladenes Teilchen verursacht durch ein negativ (positiv) geladenes Teilchen attraktiv (repulsiv) und die Kraft auf ein negativ geladenes Teilchen verursacht durch ein negativ (positiv) geladenes Teilchen repulsiv (attraktiv). Salopp formuliert findet man oft: Gleiche Ladungen stoßen sich ab, verschiedenartige Ladungen ziehen sich an.
Van-der-Waals-Kraft
Bei van-der-Waals-Kraft wird nach wechselwirkenden Partnern unterschieden. Man findet drei Arten: Die Wechselwirkung zwischen zwei permanenten Dipolen wird als Keesom-Wechselwirkung bezeichnet. Hierbei variiert die Stärke der Wechselwirkung mit der Ausrichtung der Dipole zueinander und mit der Stärke der beteiligten Dipole.
Die van-der-Waals-Kraft zwischen einem permanenten Dipol und einem induzierten Dipol wird als Debye-Wechselwirkung bezeichnet. Hierbei spielt neben der Stärke und Ausrichtung des permanenten Dipols die Polarisierbarkeit des Wechselwirkungspartners eine Rolle. Debye- und Keesom-Wechselwirkung können durch das Coulombgesetz beschrieben werden und werden daher manchmal bei der Elektrostatik einsortiert. Die dritte Art der van-der-Waals-Wechselwirkung unterscheidet sich fundamental in ihrer Ursache von den bisher beschriebenen zwei. Diese beschreibt die Wechselwirkung zwischen zwei induzierten Dipolen und wird auch London’sche Dispersionskraft genannt. Die spontanen Fluktuationen der Elektronendichteverteilungen und die damit verbundene spontane wechselseitig induzierte Polarisierung zweier unpolarer Wechselwirkungspartner sind quantenmechanischen Ursprungs und können klassisch nur näherungsweise beschrieben werden. Für alle Arten der van-der-Waals-Kraft findet man eine 1/z_\text{ts}^7-Abstandsabhängigkeit zwischen frei rotierenden, punktartigen Wechselwirkungs- partnern.
Austauschwechselwirkung und Paulirepulsion
Bei geringem Abstand zwischen Spitze und Probe dominiert die Austauschwechselwirkung. Sie ist eine Folge davon, dass Elektronen Fermionen sind. Sind die einander überlappenden Elektronenorbitale der beteiligten Wechselwirkungspartner nur teilweise besetzt (vornehmlich bindende Zustände besetzt), resultiert aus der Annäherung der Wechselwirkungspartner eine Verringerung der potentiellen Energie also eine Attraktion. Diese chemische Bindungskraft ist ein quantenmechanischer Effekt, der von den Eigenschaften (Quantenzahlen) der beteiligten Elektronen (Orbitalen) abhängt. Daher lässt sich kein klassisches Kraftgesetz angeben. Sind die einander überlappenden Orbitale voll besetzt (antibindende Zustände besetzt) resultiert aus der Annäherung der Wechselwirkungspartner eine Erhöhung der potentiellen Energie also eine Repulsion.
Da sich zwei Fermionen mit gleichen Eigenschaften nicht am gleichen Ort aufhalten können, ist bei sehr kurzen Abständen der Wechselwirkungspartner immer die Paulirepulsion dominant. Sie ist ein quantenmechanischer Effekt, der allgegenwärtig ist, aber nur eine sehr kurze Reichweite hat. In Molekülen sind in der Regel alle energetisch günstigen Orbitale doppelt besetzt (Spin up und Spin down), ein weiteres Elektron von außen müsste also einen energetisch ungünstigen Zustand einnehmen. Das führt zur Erhöhung der potentiellen Energie und führt daher zu Repulsion. Die Paulirepulsion ist im Alltag bemerkbar: Man fällt nicht durch den Boden, da die äußeren Elektronen der Moleküle in Schuh und Boden, bei weiterer Annäherung in höhere Energieniveaus übergehen müssten. Die Abstandsabhängigkeit dieser Kraft wird aus praktischen Gründen häufig mit 1/z_\text{ts}^{13} modelliert.
Lennard-Jones-Modell
Die Wechselwirkung zwischen Spitze und Probe (siehe Abbildung 3) wird häufig mit dem Lennard-Jones-Modell modelliert. Das Lennard-Jones-Modell gibt die potentielle Energie V_\text{LJ}(\vec r) eines Systems aus zwei ungeladenen, chemisch nicht aneinander gebundenen Wechselwirkungspartnern im Abstand \vec r an. Übertragen auf die Wechselwirkung zwischen Spitze und Probe ergibt sich:
V_\text{LJ}=-V_\text{eq}\left[2
\left(\frac{z_\text{eq}}{z_\text{ts}}\right)^6
-\left(\frac{z_\text{eq}}{z_\text{ts}}\right)^{12} \right]
In dieser Gleichung ist z_\text{eq} der Gleichgewichtsabstand, also der Abstand, bei dem die repulsiven Wechselwirkungen die attraktiven gerade ausgleichen und die Kraft zwischen den Wechselwirkungspartnern null ist. Das System befindet sich im Gleichgewicht und die potentielle Energie ist minimal V_\text{LJ}(z_\text{ts} = z_\text{eq} ) = -V_\text{eq}.
Für die graphische Darstellung der Spitze-Probe-Wechselwirkung in Abbildung 3 wurde Gleichung (9) verwendet. Der Gleichgewichtsabstand ist eingezeichnet.
Wie man sieht, besteht das Lennard-Jones-Modell aus zwei konkurrierenden Termen welche die attraktiven und die repulsiven Wechselwirkungen modellieren. Die Paulirepulsion, welche nur über eine sehr kurze Distanz wirkt wird durch den Ausdruck \left(z_\text{eq} / z_\text{ts}\right)^{12} modelliert. Die anziehende Wechselwirkung repräsentiert die Beiträge der van-der-Waals-Attraktion und überwiegt bei größerer Distanz. Sie wird durch den Term -\left(z_\text{eq} / z_\text{ts} \right)^6 modelliert. Das Lennard-Jones-Modell beschreibt die Abhängigkeit der potentiellen Energie vom Abstand nur unter der vereinfachenden Annahme, dass die Wechselwirkungspartner punktförmig sind. Nimmt man realistische Geometrien für Spitze und Probe an, so ändert sich die Abstandsabhängigkeit. Geht man beispielsweise von der Wechselwirkung einer punktförmigen Spitze mit einer flachen Probe aus, ändert sich die Abstandsabhängigkeit des attraktiven Terms zu -(z_\text{eq} / z_\text{ts} )^3.
Dynamisches AFM
Neben der bisher diskutierten statischen Rasterkraftmikroskopie im Modus konstanter Höhe oder im Modus konstanter Verbiegung, gibt es eine Vielzahl von Rasterkraftmikroskopietechniken, bei denen der Cantilever zum Schwingen angeregt wird. Infolge dessen ist der Cantilever im Gleichgewicht nie dauerhaft in Ruhe. Daher heißen diese Techniken dynamisches AFM.
Die Verbiegung des Cantilevers ist beim dynamischen AFM keine statische Größe. Im einfachsten Fall, wird der Cantilever durch eine sinusförmige Kraft mit gewählter Anregungskraftamplitude und Anregungsfrequenz angeregt. Der Cantilever schwingt infolge dessen sinusförmig bei der Anregungsfrequenz. Neben der statischen Verbiegung werden beim dynamischen AFM auch die Amplitude der dynamischen Cantileververbiegung und die Phasenverschiebung der Verbiegung gegenüber der Anregung gemessen. Aus einer Messung aller drei Größen kann die Kraft zwischen Spitze und Probe bestimmt werden.
Es ergeben sich zahlreiche AFM Modi die sich dadurch unterscheiden, wie viele Regelkreise verwendet werden und welche der oben genannten Größen konstant gehalten werden. Am weitesten verbreitetet sind AM-AFM und FM-AFM: Beim AM-AFM (auch Tappingmodus genannt) werden Anregungskraftamplitude und Anregungsfrequenz konstant gehalten und die Änderungen in der Amplitude und der Phasenverschiebung gemessen. Beim FM-AFM werden Amplitude und Phasenverschiebung durch zwei zusätzliche Regelkreise (dem Amplitudenregelkreis und dem Phasenregelkreis) konstant gehalten und die dafür benötigten Änderungen der Anregungskraftamplitude und der Anregungsfrequenz betrachtet.
Statisches AFM wird meist im repulsiven Bereich betrieben und damit bei sehr kleinem Spitze-Probe Abstand. Weiche Proben (z.B. biologische Proben, Zellen, usw.) können dadurch beschädigt werden. Häufig wird auf solchen Proben dynamisches AFM bevorzugt.
Auch beim dynamischen AFM wird meist ein Abstandsregelkreis verwendet, der während der Messung die z-Position der Probe z_\text p so ändert, dass eine gewünschte Größe (bei AM-AFM meist die Amplitude, bei FM-AFM meist die Anregungsfrequenz) einem gewähltem Sollwert entspricht.
Der Abstandsregelkreis
Der Abstandsregelkreis ändert die z-Position der Probe z_\text p (Stellgröße) so, dass beim statischen AFM die statische Verbiegung (Regelgröße) einem gewählten Sollwert entspricht. Dafür vergleicht der Abstandsregelkreis die tatsächliche Cantileververbiegung q_\text s^\text{ist} (Istwert) mit der gewünschten Verbiegung q_\text s^\text{setpoint} (Sollwert). Weicht der Istwert vom Sollwert ab, ändert der Abstandsregelkreis die Stellgröße, um die Differenz zwischen Soll- und Istwert q_\text s^\text{setpoint}-q_\text s^\text{ist} (Regelabweichung) zu eliminieren.
Der wichtigste Regler ist der Integralregler (I-Regler). Dieser liefert einen Stellwert, der sich durch Integration der Regelabweichung ergibt:
z_\text p(t) = K_\text I \int_0^t \left(q_\text s^\text{soll} -
q_\text s^\text{ist}(t')\right) \mathrm dt'
Der untere Graph zeigt die vom Regelkreis eingestellte Piezoauslenkung z_\text p (linke Abszisse) und die Oberflächentopographie als Gleichgewichtsabstand z_\text{eq} (rechte Abszisse) für eine simulierte Erhöhung in der Mitte.
Zunächst ist der Regler quasi ausgeschaltet (kleine Gains). Erhöhen Sie zunächst den I-Gain und anschließend den P-Gain um die Verbiegung möglichst konstant zu halten und um so das Hinderniss zu umfahren.
Hierbei ist K_\text I eine Konstante (I-Gain), die die Regelabweichung gewichtet. Ein Integralregler kann Regelabweichungen nach einiger Zeit vollständig eliminieren, benötigt dafür aber eine gewisse Integrationszeit. Wie träge ein I-Regler reagiert, wird im Wesentlichen durch die Wahl von K_\text I bestimmt.
Üblicherweise wird kein reiner I-Regler verwendet. Das im Praktikum verwendete Gerät verfügt über einen PI-Regler. Dabei wird der I-Regler mit einem proportionalen Regler (P-Regler) kombiniert. Der P-Regler liefert einen Stellwert, der proportional zur momentanen Regelabweichung ist:
z_\text p(t) = K_\text P \left(q_\text s^\text{setpoint} - q_\text
s^\text{ist}(t)\right)
Dabei ist K_\text P eine Konstante (P-Gain), die die Regelabweichung gewichtet.
Ein PI-Regler ist eine Parallelschaltung eines I-Reglers und eines P-Reglers. Der Stellwert ergibt sich daher als Summe von Gleichung (10) und (11):
z_\text p(t) = K_\text I \int_0^t \left(q_\text s^\text{setpoint} -
q_\text s^\text{ist}(t')\right) \mathrm dt' +K_\text P \left(q_\text
s^\text{setpoint} - q_\text s^\text{ist}(t)\right)
I- und P-Gain (K_\text I und K_\text P) werden während der Messung so gewählt, dass die Regelabweichung während der Messung hinreichend klein gehalten wird. Die Regelparameter dürfen nicht beliebig hoch gewählt werden, weil der Regelkreis sonst zu schwingen beginnt, d.h. der Cantilever wird durch den Regelkreis periodisch bewegt, was im schlimmsten Fall zur Beschädigung der Spitze führt. Zu niedrig gewählte Regelparameter führen dazu, dass der Regelkreis nicht schnell genug auf Änderungen der Topologie der Probe reagieren kann. Dies führt oft zu unscharfer Abbildung der Oberflächenkonturen und im schlimmsten Fall zur Beschädigung der Spitze. Je nach Oberflächenbeschaffenheit und abhängig von der Rastergeschwindigkeit ergeben sich optimale Regelparameter die meist empirisch, d.h. durch Probieren gefunden werden.
Versuchsaufbau
In diesem Versuch verwenden Sie ein MFP-3D AFM der Firma Asylum Research. Der experimentelle Aufbau ist der nachfolgenden Abbildung zu entnehmen.

Das Gerät ist bereits mit dem Computer verkabelt. Der Einbau des Cantilevers wird vom Betreuer durchgeführt. Es ist nicht erlaubt, selbständig den Cantilever ein- oder auszubauen. Die Justierung des Lasers auf dem Cantilever und die Ausrichtung der Photodiode führen Sie unter Anleitung selbst durch. Justieren Sie den Laser mittig auf dem freien Ende des Cantilevers. Anschließend wird die positionssensitive Photodiode so eingestellt, dass der Laserstrahl genau deren Mittelpunkt trifft.
Um die Spitze in möglichst kleinen Schritten über die Probenoberfläche bewegen zu können, andererseits aber einen Probenwechsel zu ermöglichen, bei dem der Cantilever einige Millimeter von der Probe wegbewegt werden muss, ist die Spitzenpositionierung in eine Grob- und eine Feinpositionierung aufgeteilt. Die Grobpositionierung wird beim MFP-3D AFM mit Hilfe einer Stellschraube am vorderen Teil des Geräts realisiert. Die Feinpositionierung wird über Piezoelemente realisiert die eine z-Auflösung im Subnanometerbereich erlauben.
Lassen Sie sich von Ihrem Betreuer in die Software einweisen.
Durchführung
Zur virtuellen DurchführungVorbemerkungen
- Notieren Sie sich stets alle eingestellten Parameter (I- und P-Gain, Setpoint, Scangröße, Scangeschwindigkeit, Scanrichtung und Proben) für jede Aufnahme, nicht nur diejenigen, die in der Tabelle gelistet sind!
- Achten Sie darauf, dass sämtliche benötigte Aufnahmen auch gespeichert werden (der Speicherort wird vom Betreuer angelegt)!
Vorbereitung der Messung
Nachdem die Probe durch den Betreuer eingesetzt und der Laser angeschaltet wurde, justieren Sie den Laser, sodass er auf das freie Ende des Cantilevers trifft und ein maximales Signal (Sum) detektiert wird. Anschließend justieren Sie den PSPD, sodass keine Verbiegung (Deflection) detektiert wird. Aus welchen Gründen tun Sie dies? Abschließend schalten Sie den Höhenregelkreis ein und nähern den Cantilever an die Probe an, bis die Verbiegung dem Sollwert (Setpoint) entspricht und am Piezoelement eine Spannung (Z Voltage) von 70 V anliegt (dies entspricht etwa 50% der max. Spannung). Was passiert beim Annähern? Starten Sie die Messung.
Abbildung einer CD- und DVD-Rom
Es werden verschiedene Probenoberflächen mit statischem AFM abgebildet.
-
Abbildung der Probe: Tasten Sie die erste der vorbereiteten Proben mit konstanter Verbiegung bei einer Scansize von 10 \cdot 10 \pu{μm2} ab.
-
Auswirkung der Regelparameter: Verwenden Sie eine Scangeschwindigkeit von 2 Hz. Variieren Sie innerhalb eines Bildes den I-Gain (5; 10; 20; 40; 80) bei ausgeschaltetem P-Regler (P-Gain von 0) und variieren Sie anschließend innerhalb eines Bildes den P-Gain (0,5; 1; 2; 4; 8) bei einem festen I-Gain Ihrer Wahl. Diskutieren Sie die Unterschiede in den Bildern, auch Trace und Retrace! Welche Artefakte können Sie erkennen? Woran erkennen Sie eine gut funktionierende Regelung? Welche der getesteten Regelparameter sind am besten geeignet? Warum?
-
Auswirkung der Scangeschwindigkeit: Verwenden Sie nun die günstigsten Regelparameter und nehmen Sie für unterschiedliche Scangeschwindigkeiten (1 Hz; 2 Hz, 4 Hz, 8 Hz, 10 Hz) je ein 10 x 10 μm² großes Bild auf. Welche Auswirkung hat die Scangeschwindigkeit auf das erhaltene Bild?
-
Auswirkung äußerer Einflüsse: Erzeugen Sie verschiedene äußere Einflüsse (lautes Reden/ Schreien, Trampeln, Stöße gegen den Schreibtisch, leichte Stöße gegen den Dämpfungstisch). Welchen Einfluss haben diese auf die Messung?
-
Auswirkung der Probe: Bilden Sie nun die beiden vorbereiteten Proben in zwei verschiedenen Größen ab (20 \cdot 20\pu{μm2} und 5 \cdot 5 \pu{μm2}), indem Sie optimale Werte für die Regelparameter und die Scangeschwindigkeit wählen. Welche Auswirkungen hat der Probenwechsel auf die Bildqualität? Was sind Gründe dafür?
Sie ändern die Werte: Scan Size, Scan Rate, Integral Gain und Proportional Gain. Sie starten eine Messung mit Do Scan und beenden Sie mit Stop. Mittels Frame Up oder Down können Sie ein Up oder Down Bild, dass sie verwerfen wollen, neu starten. Ein vollständiges Up oder Down Bild wird automatisch gespeichert und der Base Suffix um eins erhöht.
Auswertung
Zur Auswertung der virtuell aufgenommenen DatenBestimmen Sie die Breiten, Längen und Höhen der Oberflächenstrukturen inkl. Fehler. Beachten Sie dabei auch die verwendete Auflösung. Diese ergibt sich aus der Pixelanzahl (Points & Lines) und der Scan Size.
Auf CDs und DVDs sind die Daten in einer Spur in Form von Höhenunterschieden gespeichert. Ein Spurabschitt mit einer Kante repräsentiert dabei eine Eins, die Spurabschitte dazwischen (ohne Kanten) repräsentieren Nullen. Worin unterscheiden sich DVD und CD? Welchen Einfluss haben die Geometrie der Messspitze, die Regelung (P- und I-Gain) und die Scangeschwindigkeit sowie äußere Einflüsse auf das Messergebnis?
Für die Auswertung Ihrer AFM Bilder können Sie die Software Gwyddion verwenden. Das Programm steht Ihnen auf dem Messrechner zur Verfügung und kann für den privaten Gebrauch unter http://www.gwyddion.net heruntergeladen werden. Das Programm ist OpenSource und steht für Windows, Linux und MacOS kostenlos zur Verfügung. Eine ausführliche Installations- und Bedienungsanleitung kann unter http://www.gwyddion.net/documentation/ abgerufen werden.
Nachdem Sie eine Datei über Datei → Open geladen haben, können Sie im Data Browser (Unter Meta → Data Browser zu finden) den entsprechenden Kanal auswählen. Die wichtigsten Operationen und Werkzeuge stehen Ihnen direkt im Hauptfenster zur Verfügung, weitere Funktionen finden Sie unter den jeweiligen Menüpunkten.



Unter Datei → Save As … können die bearbeiteten Bilder in der gewünschten Form abgespeichert werden. Um Daten von Graphen oder Tabellen zu exportieren, finden Sie die entsprechenden Funktionen unter Graph → Exportieren als … .
Sollten Sie Fragen zu diesen oder weiteren Funktionen haben, können Sie diese auf der Gwyddion Homepage recherchieren oder ihren Betreuer fragen.
Vor- und Nachbereitung
Um die Messdaten zur Auswertung mitnehmen zu können, muss ein USB-Stick mitgebracht werden. Für das Vorgespräch mit dem Betreuer vor dem Praktikumsversuch sollten Sie das vorliegende Skript gelesen und verstanden haben und die folgenden Fragen bezüglich der Theorie und des Aufbaus des AFMs sowie zur Funktionsweise des Geräts beantworten können.
- Nennen Sie Kräfte, die im AFM wichtig sind, und ihre Abstandsabhängigkeit. Wie ist der Zusammenhang zwischen Kraft, potentieller Energie und Kraftgradient?
- Welche Rasterkraftmikroskopietechniken gibt es? Welche Signale werden gemessen?
- Wie ist ein statisches AFM aufgebaut? Was sind die Vor- und Nachteile bei der Verwendung eines Abstandsregelkreises?
- Wie funktioniert ein Regelkreis?
- Welche Bilder zeichnet man beim statischen AFM auf? Muss ein Cantilever dafür möglichst hart oder möglichst weich sein?
Nach Beendigung des Versuchs ist ein Versuchsprotokoll anzufertigen und dem Betreuer digital (per email) zuzusenden.
Das Versuchsprotokoll soll nach den Vorgaben des Kompendiums zum Grundpraktikum Physikalische Chemie angefertigt werden, alle in den Kapiteln 3 und 4 gestellten Fragen beantworten und aus folgenden Teilen bestehen: kompakter Theorieteil, Versuchsaufbau, Durchführung, Auswertung, Diskussion, Zusammenfassung, Anhang. Fügen Sie dem Anhang die während der Versuchsdurchführung gemachten Aufzeichnungen in Kopie bei.
Weiterführende Literatur
- Binnig, G., Quate, C.F. and Gerber, Ch., Atomic Force Microscope, Phys. Rev. Lett. 56, 930 (1986)
- Kaupp: Atomic Force Microscopy, Scanning Nearfield Optical Microscopy and Nanoscratching. Springer-Verlag. 2006
- Braga, Ricci: Atomic Force Microscopy. Humana Press. 2004
- Foster, Hofer: Scanning Probe Microscopy. Springer Science+Business Media. 2006